

遨博海纳系列移动式协作机器人可灵活控制协作机器人、移动底盘、视觉、末端夹爪等设备。多合一控制系统带来了简单便捷、安全可靠、扩展灵活、高效协同的全场景交互体验,可以灵活适应各种工作环境,省却繁杂操作,通过手眼脚配合来完成各种复杂的工作任务。

特性优点
多位一体
多合一控制系统可灵活控制协作机器人、移动底盘、视觉等设备,省却繁杂操作,实现一键协同体验
信息直达
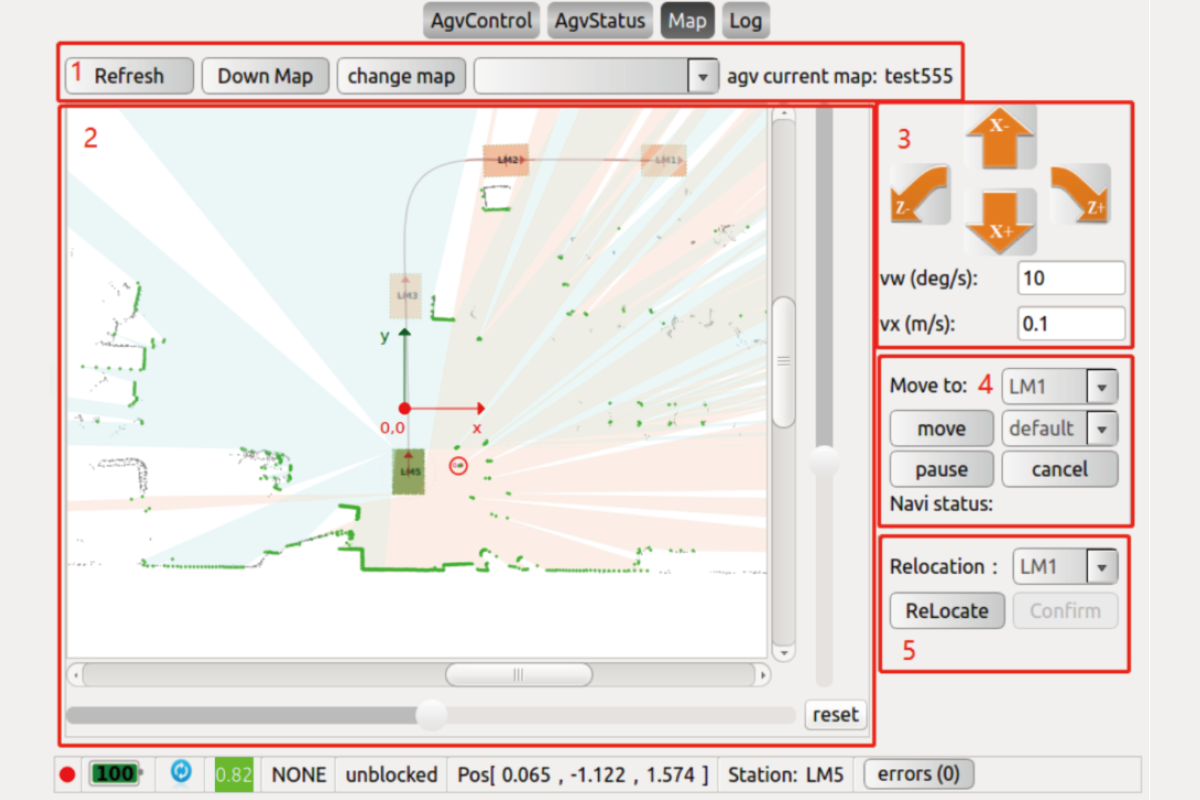
实时获取各设备状态,信息一步直达、无缝流转。机械臂示教器可以实时读取移动底盘位置、速度、电量、I/O显示及控制、激光阻挡状态、导航状态、报警日志等
扩展灵活
可灵活搭配不同负载的协作机器人、移动底盘、2D/3D视觉、末端工具等,实现跨设备间的高效协同扩展,满足不同行业的负载及场景需求
简单易用
协作机器人、移动底盘、视觉系统的编程集成到同一个编程软件上使用,流程图编程,具有允许用户编辑的任务模块软件,用户可根据自身需求设计机器人的行为,采用视觉引导机械臂实现高精度定位,与传统编程方式兼容,降低系统使用难度
安全调度
采用高精度SLAM激光雷达进行导航与定位,双轮差速运动控制,移动更加平稳
激光数据安全辅助,人员靠近移动底盘时,机械臂降速运行,保证安全
协同作业
通过遨博多合一控制系统,可实现协同控制协作机器人、移动底盘、视觉等设备,支持单机操作和多级调度方案
相关功能
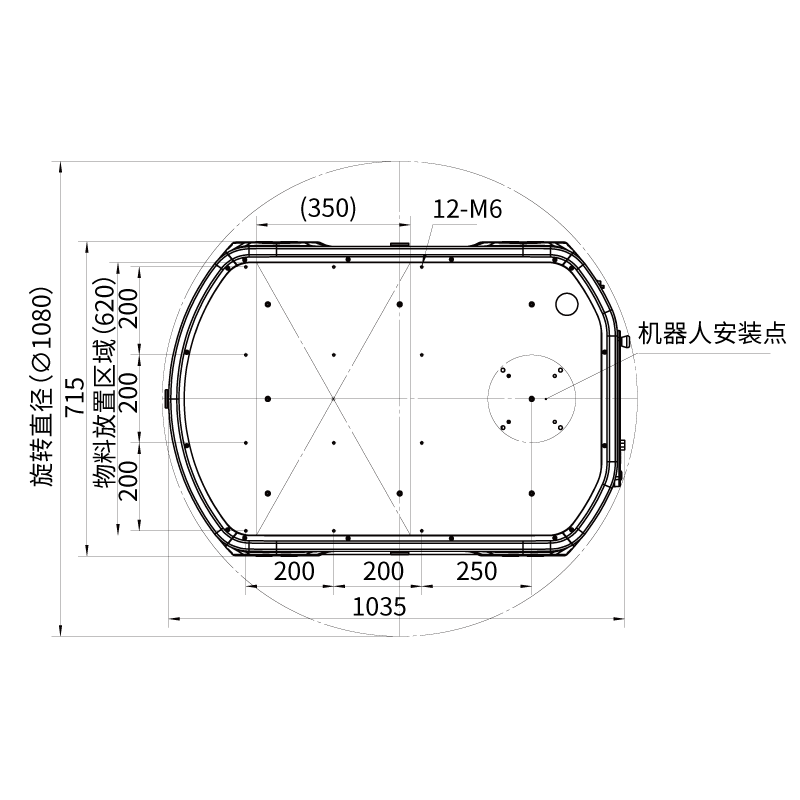
产品尺寸


 如果您对此感兴趣,欢迎问问展商吧!
如果您对此感兴趣,欢迎问问展商吧!
| 机器人品牌 | 遨博 |
| 机器人系列 | 海纳系列 |
| 机器人型号 | AUBO-AMR300 |
| 机器人类型 | 可移动协作机器人 |
| 自由度(轴数) | 六轴 |
| 安装方式/位置 | 置地 |
| 臂展(最大工作范围mm) | 550 |
| 有效负载(kg) | 300 |
| 重复定位精度(mm) | 10 |
| 应用场景 |
暂无数据如果您对此感兴趣,欢迎问问展商吧!



 CHN
CHN EN
EN