

在自动化生产线中,桁架机械手的机械手臂是一种能模仿人手操作的一种机械设备,可按照预先设定的程序完成自动抓取、搬运、上下料、翻转或旋转等动作。
功能描述
装车桁架机械手抓手具有旋转功能,可以将12片阳极板从5吨RGV小车上抓取旋转,按顺序依次放入20吨的RGV小车货架上,实现阳极板自动转运装车,同时与现有的原料销售信息化系统及生产管控系统(MES)之间进行数据交互。
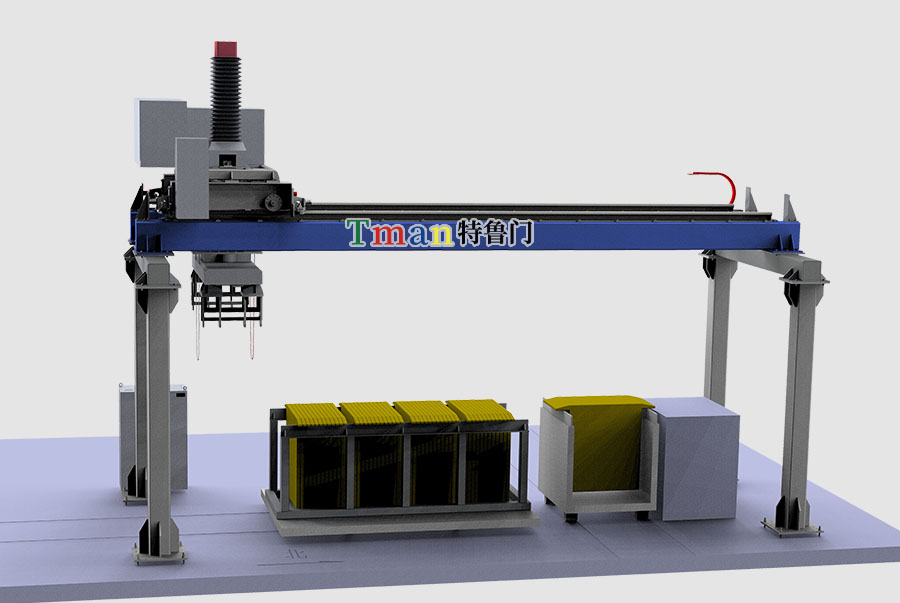
总体方案及布局
整体方案是由立柱、X轴、Z轴、R轴旋转轴、抓手、电气控制系统等组成。本设备运行平稳,快速高效,可以有效提高阳极板转运装车效率。


主要参数
|
设备载荷 |
5500kg |
|
X轴行程 |
6.04m |
|
Z轴行程 |
1.4m |
|
R轴旋转 |
90° |
|
X轴速度 |
0.5m/s |
|
Z轴速度 |
0.1m/s |
|
旋转速度 |
0-10r/min |
|
定位精度 |
±3mm |
工作流程
1.5吨RGV小车将阳极板送至装车桁架机械手一端,到位后报告上位机;
2.上位机发出命令,装车桁架机械手自5吨RGV上抓取阳极板;
3.取走阳极板后,装车桁架机械手向上位机发出申请卸货;
4.收到上位机卸货指令,装车桁架机械手将12片阳极板搬运至20吨RGV上指定位置(装车桁架能区分20吨RGV上4个位置);
5.上位机计数装车桁架机械手装车4次。
 如果您对此感兴趣,欢迎问问展商吧!
如果您对此感兴趣,欢迎问问展商吧!
| 机器人品牌 | 特鲁门 |
| 机器人系列 | |
| 机器人型号 | 阳极板转运装车桁架机械手 |
| 机器人类型 | 桁架式机器手 |
| 自由度(轴数) | |
| 安装方式/位置 | 置地 |
| 臂展(最大工作范围mm) | |
| 有效负载(kg) | 5500 |
| 重复定位精度(mm) | 3 |
| 应用场景 | 阳极板自动转运装车 |
暂无数据如果您对此感兴趣,欢迎问问展商吧!



 CHN
CHN EN
EN