
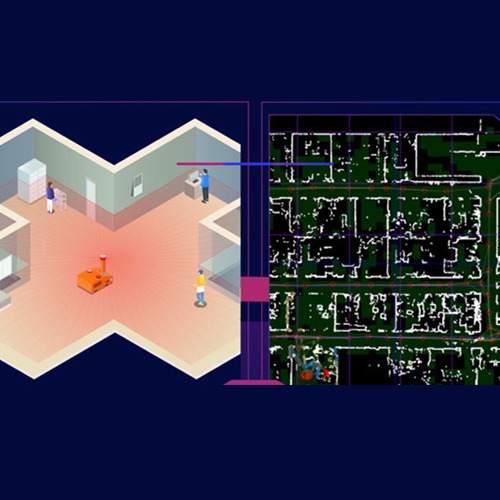
激光SLAM系统
Detour SLAM系统是独立自主开发的先进的激光SLAM导航系统。本系统完全远程,并实现了独家专利算法:点云位移/旋转不变性变换相位相关法技术、辅以ICP算法和点云地图,具备高精度、不挑设备、无惧长走廊,快速且准确地全局定位、地图自动更新的优良特性。
亮 点
● 专利算法:
点云位移/旋转变换相位相关法成功地解决了NDT/ICP等常规点云匹配算法的主要问题:糟糕的粗匹配、难以重定位、无法解决长廊效应,对点云要求过高。
● 地图自主学习功能:
当地图环境发生变化(如机台换位、增加或减少设备),Detour不仅能继续定位,而且能捕捉到变化部分并存入当前的地图中,从而保证地图的时效性。
● 高动态环境处理:
通过Detour的动态物体识别功能,在人车混走等高动态场景下仍然能够稳定提供高精度坐标。

 如果您对此感兴趣,欢迎问问展商吧!
暂无数据暂无数据如果您对此感兴趣,欢迎问问展商吧!
如果您对此感兴趣,欢迎问问展商吧!
暂无数据暂无数据如果您对此感兴趣,欢迎问问展商吧!



 CHN
CHN EN
EN