

潜伏顶升AMR W300J
激光SLAM导航+300Jkg负载

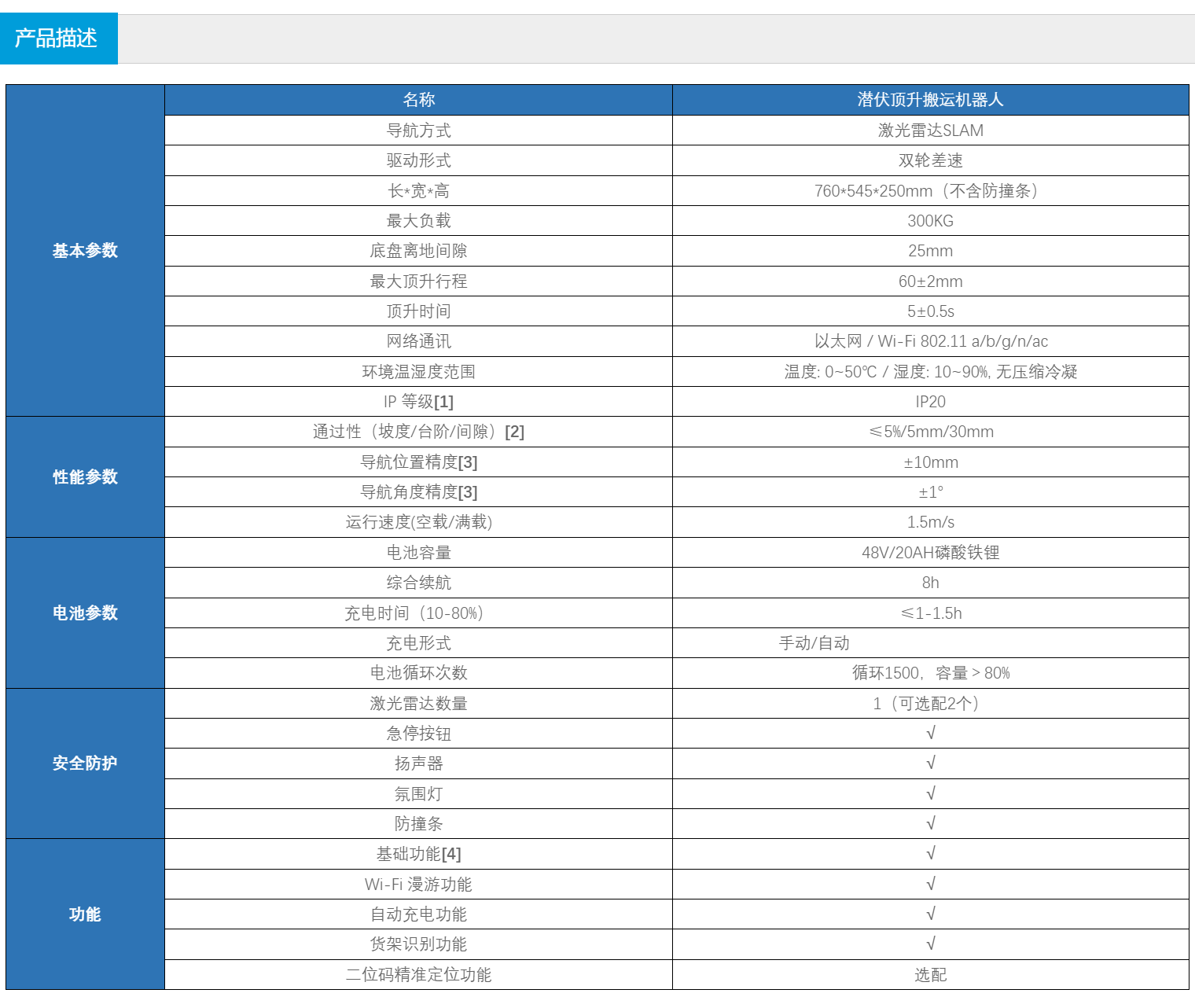
[1]. 设计用于室内运输,不推荐用于室外环境。
[2]. 路面平整、清洁,无明显起伏。坡度 5% = arctan(0.05) ≈ 2.8°。机器人不可在坡道、台阶、间隙处停止或转向,只可垂直于坡道、台阶、间隙快速通过。
[3]. 导航精度通常指机器人导航到目标站点的重复精度,在机器人激光雷达扫描到的环境相对稳定的情况下(变化率<30%),机器人从固定方向导航到目标站点的重复精度能达到预期的值。机器人沿虚拟路径运行时,会尽量贴合路径,但不保证可重复性。即机器人能保证到点精度,而不保证导航路径贴合精度。机器人支持的最小站点间距为 1cm。
[4]. 基础功能包括地图编辑、模型编辑、定位导航、API 接口等。
 如果您对此感兴趣,欢迎问问展商吧!
暂无数据暂无数据如果您对此感兴趣,欢迎问问展商吧!
如果您对此感兴趣,欢迎问问展商吧!
暂无数据暂无数据如果您对此感兴趣,欢迎问问展商吧!



 CHN
CHN EN
EN